Question 1
Ziegler-Nichols Open Loop Tuning
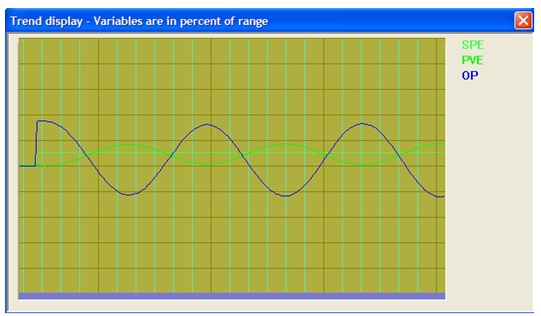
Often, when working with a faster loop, many people will opt only for a PI control philosophy. Looking at the following graph, calculate PI parameters the you would use (bearing in mind that one often has to fine tune, slightly, afterwards, just to ensure you get the results you want).

Hints you might find useful:
The horizontal divisions (left to right) are 10 second intervals.
The vertical divisions (top to bottom) are in 10% intervals.
At the start of the test, the controller output (blue pen) was at 50%.
At the start of the test, the process variable (purple pen) was at 60%.
Question 2
Ziegler-Nichols Closed Loop Tuning
Often, when working with a slower loop, many people will opt for a full PID control philosophy. Looking at the following graph, calculate PID parameters the you would use (bearing in mind that one often has to fine tune, slightly, afterwards, just to ensure you get the results you want).
Hints you might find useful:
The horizontal divisions (left to right) are 10 second intervals.
The vertical divisions (top to bottom) are in 10% intervals.
The gain used, to get constant oscillations, was 3.5