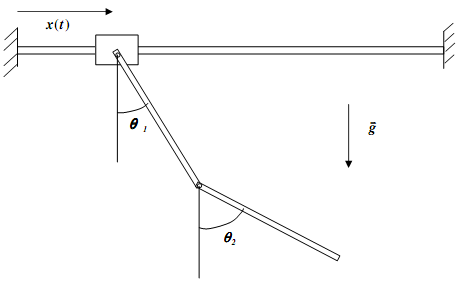
This project involes determining the dynamics of the double pendulum with a sliding base (see figure above). Each link is assumed to be of square cross section.
The objective is to determine the angles θ1 and θ2 over the time period of t = 0 s to t = 4 s. Let the base motion be prescribed as x(t)= 1/8 sin(4.2t). Based on the Newton's second law, the equations of motion (for the angular acceleration of each link) are given by

where m and l are the mass and length of the links and Ic = ml2/12 is the moment of inertia of each link. Important note: the 'dot' notation over the symbol means the corresponding derivative with respect to time.
The values of various parameters to be used in the calculations are:
g = 9.81 m/s2; I = 0.50 m; p = 6500 kg/m3 (link density); b = .05 m (dimension of square link cross-section); m =1*(b*b)op kg; lc = m*I*1/12.0 m3.
The above is a system of two 2nd order ordinary differential equations (ODEs). In order to be able to solve this, first transform them into an equivalent four 1st order ODEs. This can be accomplished as follows: Inverting or solving the system of equations above (using the backslash operator or other techniques in MATLAB) and using the fact that dθ1/ dt = .θ1 d.θ1/dt = ..θ1 (and similarly for θ2 ) will provide the values needed to complete the right hand side of the following representation of the system of four 1st order ODEs
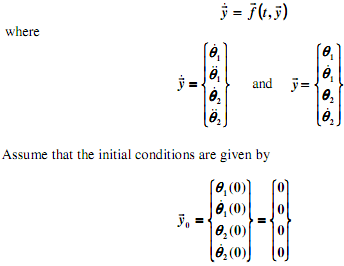
Write a MATLAB program that solves for y' over the interval t = 0 s to t = 4 s using three different methods: the Euler method, the mid-point method (2nd Order RungeKutta), and the classical 4th Order Runge-Kutta method.
To evaluate the effect of your step size (h) on the results for each of the three methods, use the following six values of h (units of seconds): 0.02, 0.01, 0.005, 0.0025, 0.00125, and 0.000625. For step sizes 0.01s and smaller, calculate the approximate percent relative error in θ1 at t = 4 s between the current step size and the next largest step size.
For example, for a step size of 0.01, the approximate percent relative error is:
