Assignment:
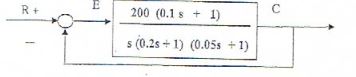
Question 1. a. Draw the Bode diagram for the attached system.
b. Is the system stable?
Question 2. Robots can be used in manufacturing and assembly operations where accurate, fast and versatile manipulation is required. The open-loop transfer function of a direct-drive arm may be approximated by:
G H (s) = K(s+2) / s(s+5)(s^2+2s+5)
a. Determine the value of gain K when the system oscillates.
b. Calculate the roots of the closed-loop system for the K determined in part a)..
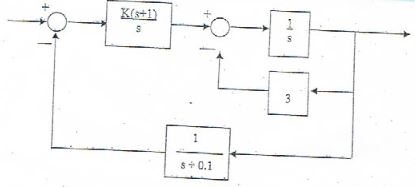
Question 3. For the system attached, determine the range of K for which the system is stable.
Provide complete and step by step solution for the question and show calculations and use formulas.