Problem Statement
Assume that a simple pendulum is attached to our spring-damper-mass system. A simple schematic of the model is given in Figure .
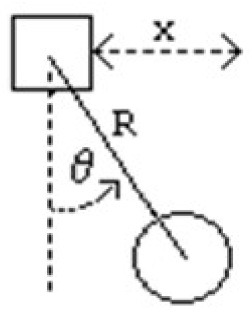
The mass can move horizontally where as the pendulum oscillates about a vertical axis attached to this mass.
The problem parameters in their appropriate units are given below in Table.
Variable Description Value
M Mass of the body 1.0
m Mass of the pendulum 1.0
k Spring constant 10.0
c Damping Coefficient 0.5
R Length of the pendulum 1.0
The equation of motion of the system can be written as:
(M+msin2 θ)x'' cx'+kX-mR(θ')2 sinθ-mgsinθcosθ=0
(M+msin2 θ)R θ''-cx'cos θ-kxcos θ+mR(θ')2sinθcos θ + (m+M)gsin θ=0
with initial condition x(0)=0 x'(0)=0 θ(0)=10° θ'(0)=0
1. By defining new variables rewrite the equations of motion in the form y '= f (t , y )
2. Solve for the dynamics of the resulting system for 20 seconds of real time using midpoint method. Choose your step size so that the local error is less than 10-4.
3. Plot x vs. t, θ vs. t and θ vs. x on three separate figures.
4. Repeat steps 2 and 3 for θ(0)=90o and θ(0)=179o while keeping the other initial conditions fixed.
Note: Don’t forget to convert the angles to radians.
Assignment
1. Develop a Matlab function named RK4.m which implements the classical 4-stage Runge-Kutta method (RK-4) for solution of IVPs.
2. Do again steps 2 and 3 by using the RK-4 method as the solution technique. Compare the step sizes used and the CPU times spent by the Mid-point and RK-4 methods.