1. A unity feedback control system has an open-loop transfer function,
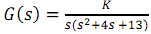
Show detailed steps and then sketch the root locus.
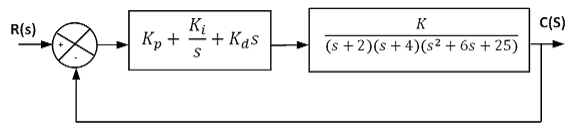
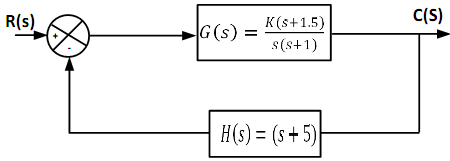
2. Sketch the root locus for the feedback control system shown in Fig. 1 and show detailed steps.
3. Study section 7.6 (pages: 502-514) on PID controllers in your textbook (Twelfth Edition) and summarize it in not more than 2 pages, do not include any examples given in the textbook. Use MATLAB to tune the parameters of the PID controller using the closed loop Ziegler - Nicholas tuning method for the system shown in Fig. 2. Plot the response of the system with the tuned PID controller for step input. Manually retune the parameters of the PID so that the system has an overshoot less than 5% and settling time less than 3 seconds.