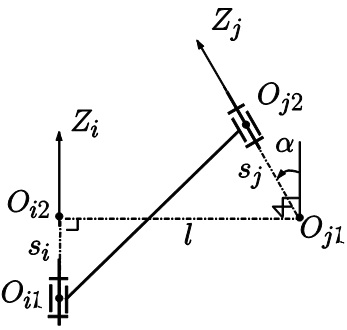
Assignment 1: Link parameters
A) Draw a CAD model of an RR link shown in figure. You may represent an R joint as in figure below or using a cylinder.
B) Create a coordinate frame on the link following the D-H convention.
C) The parameters shown in figuer below are different from the D-H link parameters. Give the D-H parameters of the link.
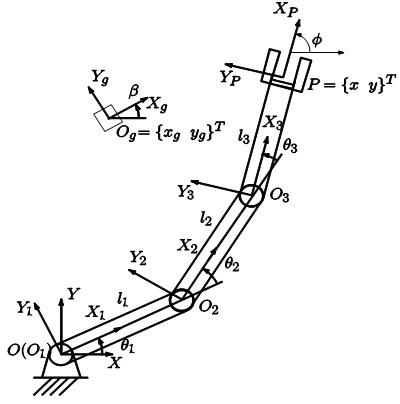
Assignment 2: Kinematic modelling of a planar robot
A) Create a CAD model of the planar robot and the target object shown in figure below using a CAD software.
B) Derive the matrice Tog, To1, T12, T23, T3p
c) Obtain Top using CAD software.
d) Verify Top = To1 T12 T23 T3p
e) Can the end-effector reach the target?
f) Verify whether the following equation is true:
T3pT23T12To1 = To1 T12 T23 T3p