1) Write down the difference between type and order of a system:
2) What do you mean by steady state error?
3) Explain acceleration error constant.
4) What are generalized error coefficients?
5) Write down the relation between generalized and static error coefficients.
6) Write down two advantages of generalized error constants over static error constants
7)(a) Deduce the expressions and design the response of first order system for unit step input.
(b) Design the response of second order system for critically damped case and when input is unit step.
8) Deduce the expressions for Rise time, Peak time, and Peak overshoot.
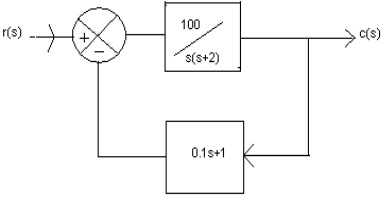
9) A potential control system with velocity feedback is given in figure. What is the response of the system for unit step input?
10) Measurements conducted on Servomechanism show system response to be c(t)=1+0.2 ê 60t-1.2 ê –10 t. when subjected to a unit step. Derive the expression for closed loop transfer function.