Assignment Problem: Ships at sea undergo motion about their roll axis. Fins called stabilizers are used to reduce this roll motion. The stabilizers can be positioned by a closed-loop roll stabilizing system shown below
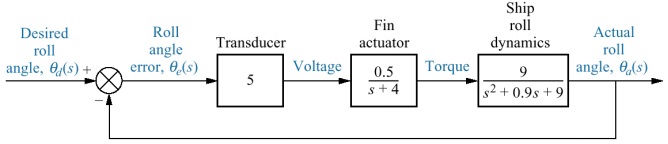
where the transducer works like a proportional (P) controller. If given the open-loop transfer function
G(s)H(s) = (22.5/((s+4)(s2+0.9s+9))x1
Problem 1: Analytically find the open-loop response c(t) to a unit impulse input, show your mathematical working and plot this open-loop system response.
Problem 2: Based on sampling theorem, determine a suitable sample interval T for the following parts of the assignment and show your reasoning. (Hint: Use Bode plots of G(s)H(s) to determine the system's cut-off frequency. At cut-off frequency the magnitude plot is about 3dB below the magnitude of the low frequency. The cut-off frequency can be considered as the highest frequency component).
Problem 3: If the G(s) can be simplified into G1(s) 22.5/4(s2+0.9s+9), derive the discrete-time system transfer function GHP(Z) from G1(s) and show your mathematical working.
Problem 4: Design a digital Proportional (P) controller to form a unit feedback control system, and optimise its parameter P with respect to the performance criterion IAE using the steepest descent minimisation process. Simulate the P controller system and plot its response for a unit step input (The performance criterion IAE = ∑k=0M| ek|).
(Please provide the plots that show the initial and the final/optimal responses).
Problem 5: If the P controller is replaced with a PID controller, using the steepest descent minimisation process again to optimise the PID controller with respect to the performance criterion IAE = ∑k=0M| ek | for a unit step input. (Please also provide the plots that show both the initial and the final/optimal responses).
If you too struggle with your academic tasks and need an external assistance for precisely finishing your academic tasks, then Computer Controlled Systems Assignment Help service is the optimum choice.
Tags: Computer Controlled Systems Assignment Help, Computer Controlled Systems Homework Help, Computer Controlled Systems Coursework, Computer Controlled Systems Solved Assignments