Assignment:
Use Newtons Law to derive equations of motion for the system. This should be converted into transfer functions for input into MATLAB/SIMULINK.
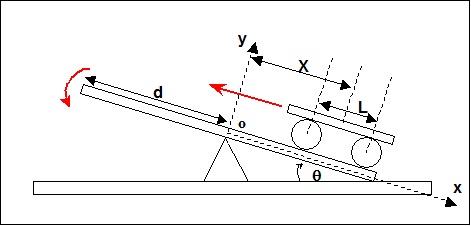
The system consists of a motorised trolley on a see-saw (see figure). The trolley motor is to be controlled and eventually the trolley must balance the beam. A potentiometer senses the angle of the beam at the centre, and relates this to the required direction of travel for the trolley.
To re-iterate, full derivation of equations of motion (Newton) and their corresponding transfer functions are needed.