Assignment:
Here is a diagram of the robot in question which is a 3-degrees of freedom manipulator with prismatic joints, as well as the following questions:
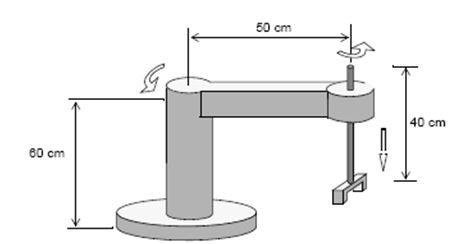
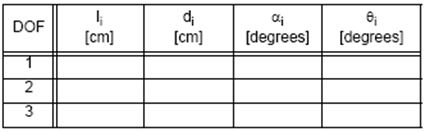
a) Assign the X and Z axes and determine the Denavit-Hartenberg parameters of this robot.
b) Determine the A matrices of this robot.
c) What is the position of the end effector with respect to the base of the robot in the specified configuration?
Provide complete and step by step solution for the question and show calculations and use formulas.